智能方面越来越完善 蔚来EC6智能车测试

高速场景
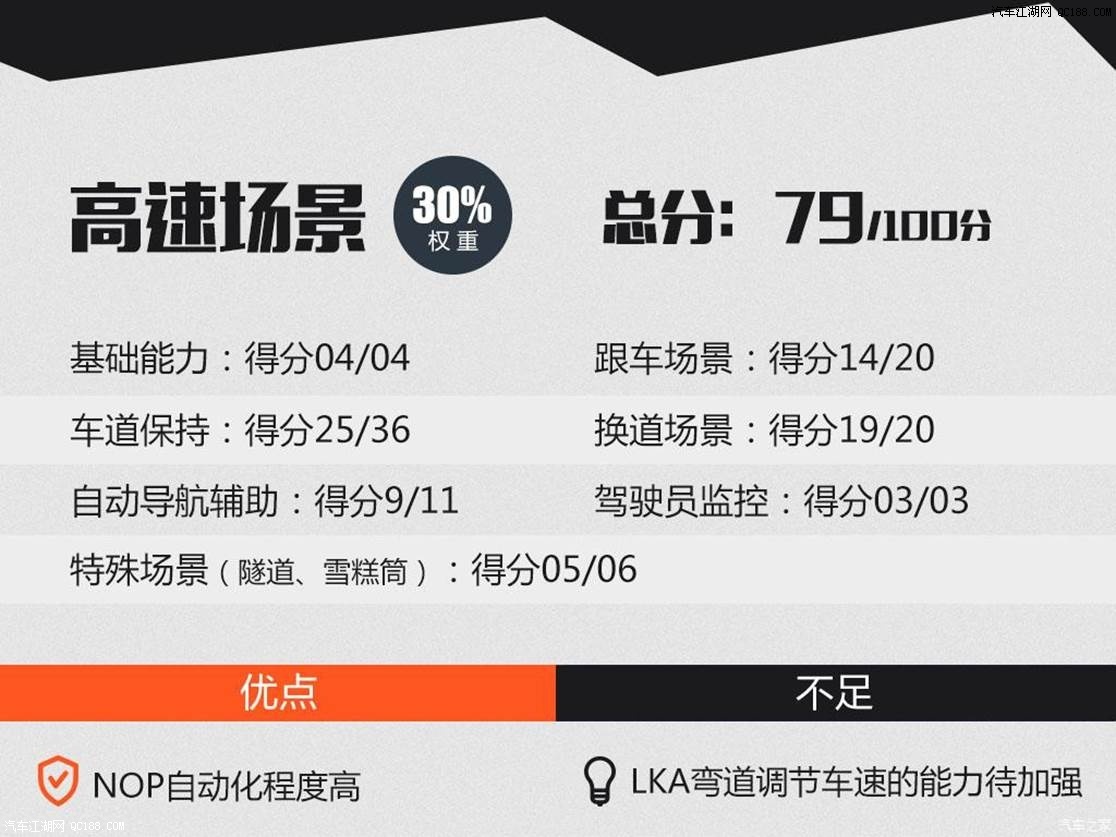
更快的车速下,系统安全性怎么样、遇到紧急情况如何处理,这些都是我们在高速场景测试环节中,要重点考查车辆驾驶辅助系统的地方。解读蔚来NIO Pilot系统优缺点之前,先来看这套系统的得分吧。
|
蔚来-蔚来EC6-2020款 615KM 签名版 智能驾驶得分总表 | ||
|
高速场景 |
分值 |
得分 |
|
基础场景 |
4.00 |
4.00 |
|
跟车测试 |
20.00 |
14.00 |
|
车道保持测试 |
36.00 |
25.00 |
|
换道测试 |
20.00 |
19.00 |
|
自动导航辅助测试 |
11.00 |
9.00 |
|
特殊场景测试 |
6.00 |
5.00 |
|
驾驶员监控测试 |
3.00 |
3.00 |
|
总分 |
100.00 |
79.00 |
|
iV-RATING智能驾驶得分 |
|
23.70 |
|
iV-RATING智能驾驶得分(计算规则:模块总分*当前模块权重30.00%) | ||
基础能力体验
扎实的基本功、稳定智能的领航辅助系统、直观简洁的交互体验,这些都有抢眼的表现,才能在基础能力测试中斩获高分。


高速跟车
与城市场景的跟车测试相似,我们依旧模拟两车同速、前车急减速的情况。不过这次测试车速从30km/h提升到了60km/h,同时考查系统反应速度与刹车的急促程度。
咱先说结果,蔚来EC6最终可以避免碰撞发生,不过刹车过程比较急促且末端触发了AEB紧急制动系统。
回顾视频画面,在前车开始刹车时,虽然自身已开始制动,但制动力较弱且车内没有相关提示。从仪表盘内看到前车被“标红”到AEB系统接入,过程短暂、刹车力度快速增加,车内乘员有一定恐慌感,体验也难称舒适。
无论融合多少种传感器、芯片算力几何,现阶段驾驶辅助系统更多是用来环节跑长途的疲劳,而非“替你开车”。伴随车速提升,扩大前后车距、集中精力,仍是应对突发状况的最好办法。
“追尾”测试
虽说在高速公路上停车是违法行为,但近年来因此造成的重大事故已不在少数,所以车辆驾驶辅助系统在应对这种场景时,能否避免碰撞、保护驾乘人员生命与财产安全,就成了我们模拟高速追尾测试的原因。
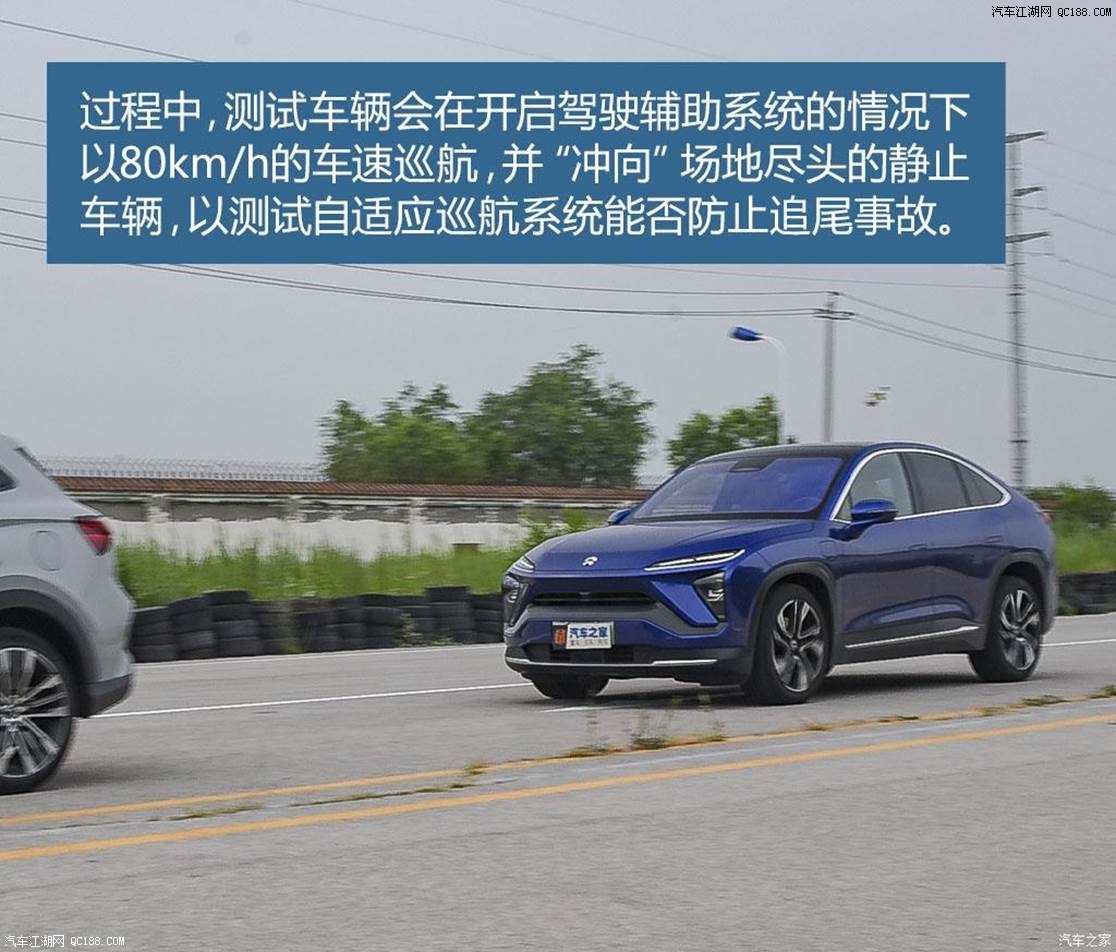
从视频来看,蔚来EC6能较早发现前方的静止车辆。重点是,系统刹车的时机比高速跟车测试中早得多,因而从开始刹车到刹停有较长的过程。不仅刹停前没有触发AEB紧急制动系统,体感舒适度也超过了我们预期。
车道保持测试
我们将车道保持测试分为以下三种场景:
1)测试场封闭50m半径的固定弯道测试,测试时速从30km/h开始,最高50km/h;
2)高速公路上开启车道保持后3分钟之内的表现情况;
3)实际高速道路上120km/h通过弯道的情况。
先说第一项测试,蔚来EC6通过测试的最高车速为40km/h,在这个速度下,LKA车道保持功能会快速修正方向,并稳稳的“咬住”车道中间。不过将车速提升到45km/h后,车辆在急弯处开始偏离车道中间,到测试人员自行修正行驶轨迹“救车”,过程中系统并未自动减速。
无论高速直线还是主路弯道行驶,蔚来EC6的LKA车道保持功能都可以让车稳定行驶在车道中间。弯道中自动修正方向的动作并不突兀,跟人工驾驶差别不大。
有意思的是,在遇到前车压线行驶时,蔚来会在不驶出当前车道的情况下,向压线车的反方向小幅躲闪。方向盘上的动作非常轻微,不容易被车内人员感知,这个细节虽然值得肯定,但过程中驾驶员有一定压迫感,要是在确保安全的前提下,增大闪避动作的幅度,或者及时制动并提示驾驶员就更好了。
换道测试
车速达到45km/h以上,蔚来EC6的ALC转向灯控制变道功能才会开始工作。在相邻车道无车状态下,打开转向灯后3秒内车辆会开始变道,8秒内即可完成全部动作。当驾驶员开启转向灯且后方车辆加速超车时,系统会给出提示音和提示画面,并暂停换道动作。
像上面视频里那样,驾驶员开启转向灯后,如果目标车道有“慢车”,系统会在监测路况的同时继续前行,直到路况允许时才会换道。无论两侧是否有车,“打灯变道”的逻辑都是一次一条,不会连续并线。
自动领航辅助测试
目前部分新势力车企率先拿出了基于导航的高级驾驶辅助系统,蔚来NOP领航辅助功能就是其中之一,相比常规驾驶辅助系统,NOP将目标锁定在高速场景下点对点的高度自动化辅助驾驶。借助高精地图数据与精度最高可达0.2米的车道级定位,这套系统可实现自动进出匝道、选择最优路线和自动调整车速等功能。
NOP功能启动后,系统会引导车辆逐步并入快车道。如果左侧车道有货车行驶,系统会根据两车相对车速与前方路况,“思考”暂时并行还是加速超车。超越慢车时,路况允许向左并线的话,整个动作干脆利落。可要是“慢车”出现在最内侧车道,即便右侧车道无车行驶,系统也会先跟前车再超车,跟车时间足有两分钟,动作执行不够果断。在距匝道入口两公里处,NOP开始逐步向右变道并减速,进匝道前系统会将车速控制在60km/h。虽然匝道过弯时方向盘的动作细碎且频繁,但车始终行驶在车道中间,城市场景测试中我们提到的“有线看线,没线跟车”逻辑,在进收费站前也有体现。
不过蔚来NOP功能在选择最优路线上也有不足之处,如视频所示,系统会将货车后的空档视为高效率路线,离开了更通畅的左侧车道,加上身后的社会车辆不断驶入,仅靠系统本身很难回到原车道。何况按“老司机”的习惯,不跟大车才是有效率、保安全的选择,所以在程序之上如何“拟人化”是NOP功能的进步方向。
施工路段识别与环境干扰
除了路况的不确定性之外,道路施工与瞬息万变的外部环境,对驾驶辅助系统来说,既是挑战也是它们需要面对的场景。
在施工路段上,蔚来EC6虽然能识别出路边的雪糕筒,但系统发出声光与文字提示时,车辆已驶入施工路段,提示时机较晚,车辆也没有修正方向或刹车等避险动作,而这也是目前驾驶辅助系统的主流表现。我们在此呼吁驾驶员朋友们,车辆开启驾驶辅助系统后,还是要保持对路况的高度关注,不能完全依赖驾驶辅助系统。
我们测试过程中突遇暴雨,从当时的视频来看,受风挡玻璃上的水膜和路面反光等因素影响,蔚来EC6的驾驶辅助系统很难启动。即便可以启动,系统稳定性也没法与晴天时相提并论。
小结
操作简单、积极沟通是高速场景测试中,蔚来驾驶辅助系统给我们留下深刻印象的地方。无论转向灯控制还是NOP开启后的自动变道,虽然偶尔会错失良机,但较为保守的并线逻辑照顾到了安全性与人的安心感。作为少数已落地的领航类驾驶辅助系统之一,蔚来NOP减轻了长途出行的疲劳感,只是在执行策略需要多向老司机学习,抗环境干扰能力也有提升的空间。